तटीय पर्यावरण प्रबंधन के लिए ड्रोन

")
समुद्र से आकाश में ईगलरे संक्रमण की एक घड़ी (क्रेडिट एनसीएसयू)
-98203 "मोंटेरे बे के ऊपर एक VTOL ड्रोन। (साभार: MBARI)")
मोंटेरे बे के ऊपर एक VTOL ड्रोन। (साभार: MBARI)
")
एक वाणिज्यिक सर्वेक्षण हेक्साकॉप्टर प्रदर्शन। (साभार: जे। मनली)
मानव रहित हवाई प्रणाली (यूएएस), जिसे आमतौर पर ड्रोन कहा जाता है, समुद्री क्षेत्र में बढ़ते प्रभाव डालती है। जैसे-जैसे इन प्लेटफार्मों की क्षमताएं बढ़ी हैं, वैसे-वैसे समुद्री विज्ञान, रक्षा, और उद्योग में भी उनका योगदान बढ़ा है। इसे पहचानते हुए, अमेरिका के एकीकृत महासागर अवलोकन प्रणाली (IOOS) के समर्थन के साथ, गठबंधन के लिए तटीय प्रौद्योगिकी (एसीटी) और उत्तर-पूर्वी क्षेत्रीय एसोसिएशन ऑफ कोस्टल एंड ओशन ऑब्जर्विंग सिस्टम (NERACOOS) ने प्रबंधन को संबोधित करने के लिए ड्रोन के लिए व्यावहारिक उपयोग के लिए एक कार्यशाला बुलाई। वेल्स, नेशनल एस्टुअरीन रिसर्च रिजर्व (WNERR) में वेल्स, मेन में 2018 के अंत में तटीय क्षेत्रों में समस्याएं। कार्यशाला को तटीय प्रबंधन में ड्रोन के तेजी से बढ़ते अनुप्रयोगों का समर्थन करने के लिए सूचना और सर्वोत्तम प्रथाओं को साझा करने की सुविधा के लिए डिज़ाइन किया गया था।
कार्यशाला का सारांश
कार्यशाला के लक्ष्य अनुसंधान और निगरानी-ग्रेड यूएएस में प्रौद्योगिकी की स्थिति को संक्षेप में प्रस्तुत करना था, इस क्षेत्र में वर्तमान उपयोग के उदाहरणों को संकलित करें, यूएएस से जुड़ी सीमाओं और तार्किक चुनौतियों को समझें, परिचालन और डेटा प्रबंधन विकसित करें और सर्वोत्तम प्रथाओं का विश्लेषण करें। और समुद्र तटीय अवलोकन प्रणालियों के लिए भविष्य के विकास और अनुप्रयोगों का वर्णन करें। एक व्यापक कार्यशाला रिपोर्ट अधिनियम वेबसाइट (www.act-us.info) से उपलब्ध है।
कार्यशाला में तटीय समुद्री वातावरणों में सही मायने में मात्रात्मक मल्टीस्पेक्ट्रल और हाइपरस्पेक्ट्रल रिमोट सेंसिंग की चुनौतियों का पता लगाने और सार्वजनिक और निजी भूमि और महासागर स्थानों में ड्रोन का उपयोग करने से जुड़े कानूनी और गोपनीयता के मुद्दों की भी तलाश की गई।
व्यापक इनपुट और क्रॉस-सेक्टर सूचना-साझाकरण को बढ़ावा देने के लिए, कार्यशाला के प्रतिभागियों में निजी क्षेत्र के यूएएस प्रौद्योगिकी डेवलपर्स और सेवा प्रदाता, अकादमिक शोधकर्ता यूएएस का उपयोग कर और / या सरकारी एजेंसी स्टाफ सदस्यों का उपयोग कर रहे हैं।
यूएएस डेटा या प्रबंधन के मुद्दों पर काम करना जो यूएएस के साथ संबोधित किया जा सकता है।
कार्यशाला के पहले दिन में तीन प्रकार के यूएएस के क्षेत्र प्रदर्शनों को प्रदर्शित किया गया: क्वाडकॉप्टर, फिक्स्ड विंग और हेक्साकॉप्टर।
दूसरे और तीसरे दिन पैनल सत्र थे जिनमें प्रस्तुतियाँ शामिल थीं जैसे विषय:
• निवास स्थान का सर्वेक्षण करने के लिए ड्रोन
• फ्लोरिडा में हानिकारक अल्गल ब्लूम (HAB) का पता लगाने और निगरानी के लिए ड्रोन
• पूर्वी तट, खाड़ी तट और पश्चिमी तट पर तीन स्थलों पर ज्वार के दलदल के सर्वेक्षण के लिए एक उपकरण के रूप में ड्रोन
• मोंटेरी बे में तटीय / अपतटीय पारगमन और अन्य अनुसंधान के लिए ड्रोन का उपयोग करना
• हवा और समुद्री वातावरण में काम करने वाले ड्रोन का विकास
 वेल्स नेशनल एस्टुरीन रिसर्च रिजर्व ड्रोन का स्वागत करता है। (साभार: जे। मनली)
वेल्स नेशनल एस्टुरीन रिसर्च रिजर्व ड्रोन का स्वागत करता है। (साभार: जे। मनली)
प्रत्येक पैनल सत्र के बाद ब्रेकआउट समूह चर्चा हुई। पूर्ण सत्रों में ब्रेकआउट समूहों से रिपोर्ट-आउट और पैनल और ब्रेकआउट विषयों के बड़े समूह चर्चा शामिल थे। प्रस्तुतिकरण और चर्चा के प्रमुख टेकवेवे संदेशों में निम्नलिखित थे:
• जबकि यूएएस तटीय प्रबंधन के लिए एक नया उपकरण है, उनके मूल्य का प्रदर्शन विभिन्न प्रकार के अनुप्रयोगों के लिए किया गया है जैसे कि आवास मानचित्रण, वन्यजीव निगरानी, प्रवाल विरंजन का पता लगाना, शंख प्रबंधन, समुद्री मलबे का पता लगाना, तटरेखा परिवर्तन की निगरानी, समुद्र तटों का प्रबंधन और रेत संसाधन, बाढ़ क्षेत्रों की मैपिंग, और पुलों और अन्य संरचनाओं का निरीक्षण।
• यूएएस कई अन्य प्रबंधन संदर्भों में भी उपयोगी हो सकता है जैसे हानिकारक अल्गल ब्लूम (एचएबी) का पता लगाना और ट्रैकिंग करना, मानव / जानवरों की बातचीत की निगरानी, पानी की गुणवत्ता की निगरानी, प्रदूषक ट्रैकिंग और ज्वार की स्थिरता की निगरानी करना।
• प्रबंधक ड्रोन का उपयोग करने के लिए उत्सुक हैं, लेकिन उनका उपयोग कैसे करें यह हमेशा अच्छी तरह से नहीं समझा जाता है। यह पूछकर शुरू करना महत्वपूर्ण है, "प्रबंधन प्रश्न या समस्या क्या है?" यह निर्धारित करेगा कि डेटा की क्या आवश्यकता है और उन्हें कैसे एकत्र किया जाना चाहिए, जो ड्रोन हो सकते हैं।
• किसी भी डेटा के साथ, ड्रोन डेटा को सूचना में अनुवादित करने की आवश्यकता होती है, जिसे तब प्रबंधन के लिए उपयोग किया जा सकता है।
• सटीक मात्रात्मक भू-स्थानिक डेटा प्राप्त करने के लिए ड्रोन का उपयोग करना चुनौतीपूर्ण है और इसके लिए उन्नत तकनीकी कौशल और ज्ञान की आवश्यकता होती है। ड्रोन संचालन और डेटा प्रोसेसिंग में विशेषज्ञों को किराए पर लेना आम तौर पर आवश्यक है।
• भू-स्थानिक डेटा एकत्र करने के लिए ड्रोन का उपयोग करने के लिए सर्वोत्तम अभ्यास अच्छी तरह से स्थापित हैं। सर्वोत्तम प्रथाओं पर मार्गदर्शन, प्रिसिजनहॉक ई-बुक बियॉन्ड द एज और यूएसजीएस मानवरहित विमान प्रणाली डेटा प्रबंधन योजना 2015 जैसे प्रकाशनों में उपलब्ध है।
• वर्कशॉप अटेंडेंट्स ने वर्तमान में ड्रोन तकनीक में सबसे बड़ी सीमाओं में से एक के रूप में बैटरी की कमी के कारण छोटी उड़ान के समय की पहचान की। अन्य वांछित तकनीकी सुधारों में विस्तारित पेलोड क्षमताओं, विभिन्न पेलोड / सेंसर, सभी मौसम क्षमताओं को ले जाने के लिए ड्रोन को अनुमति देने के लिए मॉड्युलैरिटी, "होशियार" स्थितिजन्य जागरूकता के साथ ड्रोन, डेटा भंडारण क्षमता में वृद्धि, डेटा प्रकारों का मानकीकरण, डेटा प्रबंधन में सुधार जैसे -बोर्ड डेटा प्रोसेसिंग, और क्षमताएं जो इमेजरी और रिमोट सेंसिंग से परे जाती हैं, जैसे कि पानी के नमूने उपकरण को तैनात करना।
• कानून और नियम महासागर और तटीय अनुसंधान और प्रबंधन के लिए ड्रोन के उपयोग में बाधा डालते हैं। उदाहरण के लिए, ड्रोन केवल 400 फीट से नीचे उड़ाया जा सकता है और हर समय पायलट की दृष्टि रेखा के भीतर रहना चाहिए। प्रत्येक ड्रोन को एक समर्पित, लाइसेंस प्राप्त पायलट द्वारा प्रवाहित किया जाना चाहिए, जिसका अर्थ है कि कई ड्रोनों को एक पायलट द्वारा एक झुंड में नियंत्रित नहीं किया जा सकता है। एक और महत्वपूर्ण विचार यह है कि कानूनों और नियमों में संभावित बदलावों के बारे में अनिश्चितता के कारण अनुसंधान की योजना बनाना मुश्किल हो जाता है।
• एसीटी जैसे स्वतंत्र इकाई द्वारा यूएएस प्लेटफार्मों और सेंसर का परीक्षण और मूल्यांकन शोधकर्ताओं, प्रबंधकों और तकनीशियनों के लिए उपयोगी होगा।
प्रौद्योगिकी हाइलाइट्स
कार्यशाला में कई नवीन तकनीकों को प्रस्तुत किया गया। सभी मानवरहित प्रणालियों के लिए एक महत्वपूर्ण चिंता पेलोड है। इस कार्यशाला के दौरान मोंटेरे बे एक्वेरियम रिसर्च इंस्टीट्यूट (एमबीएआरआई) के शोधकर्ताओं ने एक फ्लाइटव्यू एज, एक हाइब्रिड ट्राइकोप्टर फिक्स्ड विंग विमान के उपयोग पर चर्चा की। यह वर्टिकल टेक ऑफ और लैंडिंग (वीटीओएल) तकनीक का उपयोग करके इसे बंद कर सकता है। यह हॉवर से आगे की उड़ान और फिर से वापस जाने के लिए मूल रूप से संक्रमण भी कर सकता है। इसका स्वैपेबल ट्विस्ट-लॉक पेलोड सिस्टम ऑपरेटरों को एकल विमान का उपयोग करके कई मिशनों को उड़ाने की अनुमति देता है। MBARI ऑपरेटरों ने थर्मल फ्रंट मैपिंग के लिए FLIR इमेजर के साथ संयुक्त इस ड्रोन का उपयोग किया। उन्होंने बहुत उच्च-रिज़ॉल्यूशन वाले कैमरों का भी इस्तेमाल किया और पानी में जानवरों की पहचान करने में सक्षम थे, इस उदाहरण में जेलीफ़िश, साथ ही उड़ान में पक्षी।
MBARI, और अन्य विज्ञान उपयोगकर्ताओं के क्षेत्र परिणामों के अलावा, कार्यशाला ने ड्रोन के लिए नए विचार प्रस्तुत किए जो हवा और पानी के भीतर दोनों को संचालित कर सकते हैं। नॉर्थ कैरोलिना स्टेट यूनिवर्सिटी ने क्रॉस-डोमेन स्वायत्त वाहनों (एक्सएवी) के लिए अवधारणाएं प्रस्तुत कीं। DARPA के प्रायोजन और Teledyne वैज्ञानिक के साथ साझेदारी के साथ, इस टीम ने एक निश्चित विंग ड्रोन का निर्माण किया जो उड़ और तैर सकता है। इस प्रणाली को, ईगलरे को डब किया गया, 2015 और 2016 के बीच बड़े पैमाने पर विकसित और परीक्षण किया गया। ईगलरे वाहन एक यूएवी-यूयूवी हाइब्रिड है जो एक निश्चित-विंग वीटीओएल डिजाइन पर आधारित है। दो पुनरावृत्तियों का निर्माण किया गया है और एक पूर्ण तैराकी-मक्खी-तैराकी चक्र का प्रदर्शन किया गया है। संस्करण 2 में स्वायत्त संचालन के लिए ऑटोपायलट हार्डवेयर और सेंसर शामिल हैं। निष्क्रिय रूप से बाढ़ / जल निकासी डिब्बे वाहन को तटस्थ तटस्थता प्राप्त करने की अनुमति देते हैं, लेकिन शीघ्रता से गिट्टी के पानी को बहा देते हैं। दो सक्रिय उछाल वाले प्रतिपूरक डिजाइनों का भी परीक्षण किया गया है। प्रोपेलर प्रोपल्शन ब्रशलेस इलेक्ट्रिक मोटर्स द्वारा संचालित है। दोनों अलग-अलग हवा और पानी के प्रणोदन और दोहरे उपयोग प्रणालियों का परीक्षण किया गया है
कार्यशाला में चर्चा की गई एक और नई तकनीक इग्लू इनोवेशंस से सीहॉक थी। इस उपन्यास डिजाइन के दो संस्करण हैं, सीहॉक अल्फ़ा और सीहॉक चिमरा। अल्फा एक विशिष्ट क्वाडकॉप्टर की तरह दिखता है और हवा में भी ऐसा ही करता है। एक क्वाडकॉप्टर के विपरीत, अल्फ़ा नियंत्रण केंद्र के लिए वायरलेस टेलीमेट्री युक्त एक वियोज्य बोया है। जब वाहन डूब जाता है, तो बुआ सतह पर बनी रहती है और वाहन से टकराती है, इस प्रकार संचार बनाए रखती है। बुओ को पूरी तरह से स्वायत्त पानी के नीचे के संचालन के लिए हटाया जा सकता है। अल्फ़ा में 5 किलो (10 पाउंड) की पेलोड क्षमता और अधिकतम उड़ान की गति 60 किमी / घंटा (37 मील प्रति घंटा) है। एक समर्पित पानी के नीचे प्रणोदन प्रणाली जलमग्न होते हुए 4 किलोमीटर तक की गति से अल्फा को स्थानांतरित करती है। इसकी परिचालन गहराई 50 मीटर (150 फीट) है, और यह किसी भी माध्यम में संयुक्त लगभग 60 मिनट तक काम कर सकता है। चिमेरा अल्फा के समान दिखाई देता है, सिवाय इसके कि वाहन सतह पर रहता है और पानी के नीचे केवल पेलोड तैनात किया जाता है। 20 किग्रा (40 पाउंड) तक की पेलोड क्षमता के साथ, वाहन को अल्फ़ा की तुलना में व्यापक रूप से पेलोड ले जाने के लिए एक मॉड्यूलर प्लेटफॉर्म के रूप में इरादा है। उदाहरण के लिए, पेलोड उन्नत पानी के नीचे की क्षमता प्रदान करने वाला आरओवी या एयूवी हो सकता है। चिमेरा पानी के ऊपर भी मंडरा सकता है और पानी की सतह पर न्यूनतम गड़बड़ी के साथ नमूने एकत्र करने के लिए एक नमूना डिवाइस को नीचे कर सकता है।
अधिनियम कार्यशाला में उभरती प्रौद्योगिकियों की चर्चा, प्रदर्शन और प्रस्तुति प्रभावशाली थी। अधिक जानकारी में रुचि रखने वाले पाठक ACT से संपर्क कर सकते हैं।
 ऊपर और नीचे: SeaHawk फ्लाइंग / स्विमिंग ड्रोन (क्रेडिट: इग्लू नवाचार)
ऊपर और नीचे: SeaHawk फ्लाइंग / स्विमिंग ड्रोन (क्रेडिट: इग्लू नवाचार) 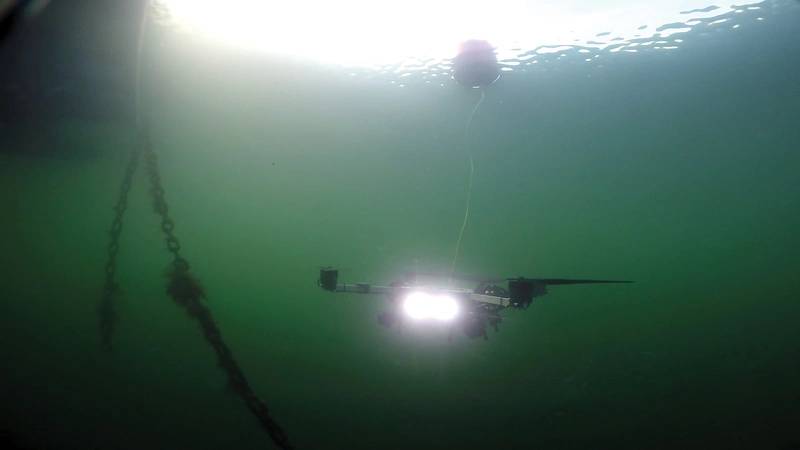
https://magazines.marinelink.com/nwm/MarineTechnology/201903/
वार्ड को गहरे समुद्र में अनुसंधान पोत के लिए रिकॉर्ड 800 मिलियन डॉलर का ऑर्डर मिला
")
Ørsted और PGE ने पोलैंड के बाल्टिका 2 अपतटीय पवन ऊर्जा संयंत्र में पहली नींव स्थापित की
-170484 "(क्रेडिट: वैन ओर्ड)")
MTR100: सबसी लीडर्स की प्रोफाइलिंग - आवेदन खुले हैं

उत्तरी अटलांटिक राइट व्हेल ने इस प्रजनन मौसम में 2009 के बाद से सबसे अधिक बच्चे पैदा किए हैं।
 को 9 अप्रैल, 2026 को केप कॉड खाड़ी में अपने बच्चे के साथ देखा गया। क्रेडिट: न्यू इंग्लैंड एक्वेरियम, NOAA परमिट #25739-01 के तहत लिया गया।")
पलावास-लेस-फ्लोट्स में लाइनअप ओशन का सर्फ़्रीफ़ प्रोजेक्ट

राहत की एक किरण: अमेरिकी पोतों ने खाड़ी में हाइपोक्सिया का मानचित्रण किया

एकीकृत, बहु-डोमेन पोर्ट सुरक्षा
-169807 "ओशन एरो के ट्राइटन स्वायत्त जलमग्न और सतही वाहन (एयूएसवी) को पिछले साल गल्फपोर्ट बंदरगाह द्वारा अपनाया गया था। क्रेडिट: ओशन एरो")
MTR100: सबसी लीडर्स की प्रोफाइलिंग - आज ही आवेदन करें!

लैम्परेल ने सबसी पाइपलाइन रिप्लेसमेंट प्रोजेक्ट के लिए ONGC के साथ समझौता किया

पानी के भीतर की प्रणालियों की परिचालन स्वायत्तता के लिए एक सहायक तकनीक के रूप में स्वचालित डॉकिंग

उज्ज्वल भविष्य: गहरे समुद्र के लिए नीले लेजर

सबसे गहरे क्षितिजों को शक्ति प्रदान करना: चरम पनडुब्बी वाहनों के लिए लिथियम बैटरी का चयन
 और 30 किलोवाट-घंटे (266 V)। साभार: Ictineu Submarins SL")