पानी के नीचे के वाहनों के लिए इलेक्ट्रिक मोटर का चयन: आंशिक भार क्षमता के विचार
यह सराहना करना आसान है कि स्थायी चुंबक तुल्यकालिक मोटर्स (पीएमएसएम) पानी के नीचे के वाहनों (यूवी) में उपयोग के लिए लोकप्रिय क्यों हैं। वे उच्च शक्ति घनत्व के साथ कॉम्पैक्ट और कुशल हैं। इससे भी महत्वपूर्ण बात, शायद, वे व्यापक RPM रेंज में प्रभावी संचालन की अनुमति देते हैं जो कई परिचालन स्थितियों वाले वाहनों के लिए फायदेमंद है। उस ने कहा, हम पाते हैं कि वाहन उत्पाद डेवलपर अक्सर मोटर की "दक्षता" के बारे में अनिश्चित होते हैं। यह आलेख प्रोपेलर डिज़ाइनर के परिप्रेक्ष्य से कुछ टिप्पणियां प्रदान करता है, जो यूवी के मोटर पर भार डालने वाले घटकों को विकसित करता है।
हमें सबसे पहले "सिस्टम" के विवरण के साथ शुरू करना चाहिए, जो वाहन (जो थ्रस्ट की आवश्यकता को स्थापित करता है), एक प्रोपल्सर (आमतौर पर एक खुला या डक्टेड प्रोपेलर जो आवश्यक थ्रस्ट बनाता है), और ड्राइव (वह प्रमुख प्रस्तावक) से बना है। जिसका एकमात्र काम प्रोपल्सर को उसके आवश्यक RPM पर स्पिन करना है)। यदि हम सिस्टम को एक वैचारिक इकाई में लपेटते हैं, तो सिस्टम का लाभ वाहन की गति (या टॉपुल एप्लिकेशन के मामले में थ्रस्ट) है, जबकि सिस्टम की लागत "ईंधन की खपत" है। आंतरिक दहन इंजनों द्वारा संचालित प्रणालियों के लिए, लागत प्रति घंटे लीटर की इकाइयों में ईंधन तेल की खपत है। इंजन निर्माता आमतौर पर इंजन के RPM और पावर रेंज में ईंधन की खपत के बारे में पर्याप्त जानकारी प्रदान करते हैं ताकि हम किसी भी एप्लिकेशन के लिए ईंधन के उपयोग का विश्वसनीय अनुमान लगा सकें। इस वितरण के एक प्लॉट को अक्सर "ईंधन मानचित्र" कहा जाता है, लेकिन मुझे आपको इसे आउटपुट-टू-इनपुट ऊर्जा "दक्षता मानचित्र" के रूप में सोचना चाहिए।
दुर्भाग्य से, पीएमएसएम ड्राइव का उपयोग करते समय हमारे पास पूरी तरह से अलग परिस्थिति होती है। भ्रम पैदा हो सकता है क्योंकि मोटर का उत्पन्न लाभ और मोटर द्वारा उपयोग किए जाने वाले ईंधन "पावर" शब्द साझा करते हैं - एक आउटपुट मैकेनिकल शाफ्ट पावर (जो प्रणोदक को चलाता है) और दूसरा इसकी इनपुट विद्युत शक्ति (वोल्टेज का एक कार्य) और नियंत्रक द्वारा आपूर्ति की गई धारा)। दोनों का अनुपात "मोटर दक्षता" है। सभी RPM और लोडिंग पर सही मोटर दक्षता जानना सफल सिस्टम डिज़ाइन और विश्लेषण के लिए महत्वपूर्ण है। जबकि अधिकांश डेवलपर परीक्षण विद्युत शक्ति को रिकॉर्ड करते हैं, हमें सिस्टम के समग्र प्रदर्शन को समझने के लिए शाफ्ट पावर को जानना होगा।
जबकि एक निर्माता का प्रकाशित मोटर वक्र आरपीएम रेंज में टोक़ (और इस प्रकार शक्ति) की सीमा को इंगित करता है, वे अक्सर केवल एक डिजाइन बिंदु पर या टोक़ सीमा पर यांत्रिक-से-विद्युत दक्षता का संकेत देते हैं। इंजन आपूर्तिकर्ताओं से जो उपलब्ध है, उसके विपरीत, पीएमएसएम के लिए आरपीएम और शाफ्ट पावर लोडिंग दोनों की उपयोगी सीमा में हमारे पास शायद ही कभी पूर्ण यांत्रिक-से-विद्युत शक्ति "दक्षता मानचित्र" हो। इस डेटा को प्राप्त करने के लिए, हमारे कुछ ग्राहकों ने दक्षता मानचित्र बनाने के लिए छोटे डायनेमोमीटर पर अपनी मोटरों का परीक्षण किया है। हालांकि, यह महंगा और समय लेने वाला हो सकता है - और प्रारंभिक चरण के डिजाइन के दौरान संभावित रूप से व्यर्थ व्यायाम जहां एक सवाल है कि क्या मोटर का चयन भी किया जाएगा।
पीएमएसएम के लिए खोई हुई दक्षता के स्रोत क्या हैं? स्पष्टीकरण वाइंडिंग प्रतिरोध, यांत्रिक घर्षण, यहां तक कि चुंबकीय प्रवाह प्रभाव जैसे शब्दों का एक जटिल मिश्रण है। तो चलिए इसे व्यापक शब्दों का उपयोग करते हुए कुछ सामान्यीकरणों के साथ थोड़ा सरल करते हैं: मैकेनिकल लोड शाफ्ट पावर (PS), दक्षता (EFF), RPM, और पावर लॉस (LOSS)।
• मोटर दक्षता को EFF = PS / (PS+LOSS) के रूप में परिभाषित किया गया है।
• चीजों को सरल बनाने के लिए, हम कह सकते हैं कि नुकसान दो प्रकार के होते हैं: पावर लोडिंग पर निर्भर या RPM पर निर्भर।
• नुकसान (दक्षता नहीं, बल्कि नुकसान) आनुपातिक होते हैं a) RPM और b) शक्ति के वर्ग के लिए।
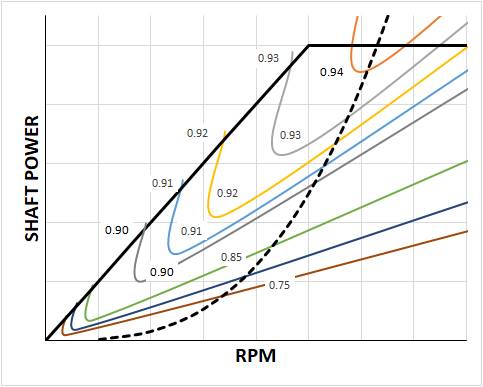
"निरंतर-टोक़, स्थिर-शक्ति" पीएमएसएम के लिए नीचे दिए गए भूखंडों में एक सामान्य प्रतिनिधि दक्षता मानचित्र दिखाया गया है। यह हमारा अभ्यास है कि हम हमेशा "टॉर्क-आधारित" प्लॉट को "पावर-आधारित" में परिवर्तित करते हैं, क्योंकि हमें लगता है कि बिजली ऊर्जा उत्पादन और वाहनों और प्रणोदकों के लिए संचरण का एक बेहतर तरीका है। ठोस काली रेखा मोटर की सीमा वक्र का प्रतिनिधित्व करती है, धराशायी रेखा एक सामान्य प्रणोदक मांग वक्र है, और रंगीन रेखाएँ नमूना दक्षता मानचित्र आंकड़े हैं।
इस आलेख से, हम देख सकते हैं कि आंशिक भार पर संचालन मोटर दक्षता को कैसे प्रभावित करता है। RPM की एक विस्तृत श्रृंखला है जो उच्च दक्षता बनाए रखती है, क्योंकि RPM की ऊपरी सीमा का लगभग आधा मोटर की अधिकतम दक्षता के कुछ प्रतिशत के भीतर है - जब तक कि मोटर अपनी रेटेड शक्ति का 80% या उससे अधिक उत्पादन कर रहा हो। वाहन संचालन के संदर्भ में, शीर्ष गति पर दक्षता अधिकतम है, 95% धक्का दे रही है। 75% गति पर, बिजली की मांग 40% -45% है और दक्षता 85% -90% तक गिर जाती है। 50% गति पर, थोड़ी शक्ति की आवश्यकता होती है और मोटर दक्षता 75% से कम हो सकती है।
(याद रखें, ये एक अवधारणा का प्रतिनिधित्व करने के लिए यहां उपयोग किए जाने वाले सामान्य आंकड़े हैं। वास्तविक क्षमताएं मॉडल से मॉडल में भिन्न होंगी।)
तो, मैं आपको कुछ बुनियादी अवलोकनों के साथ छोड़ दूं:
• पीएमएसएम की अधिकतम संभावित दक्षता मोटर के आकार के साथ बदलती है - बड़ी शक्ति वाली मोटरें उच्च क्षमता के लिए क्षमता प्रदान करती हैं। उदाहरण के लिए, एक 20 kW PMSM में पूर्ण भार पर 95% से अधिक की अधिकतम मोटर क्षमता हो सकती है, जहाँ 1 kW से कम की मोटर आमतौर पर केवल 90% तक पहुँचती है।
• जैसा कि ऊपर उल्लेख किया गया है, जबकि दक्षता RPM के साथ भिन्न होती है, RPM की काफी विस्तृत श्रृंखला होनी चाहिए जो पूर्ण या लगभग पूर्ण लोड की आवश्यकता वाले अधिकांश अनुप्रयोगों के लिए उच्च दक्षता बनाए रखती है।
अधिकांश अनुप्रयोगों के लिए आंशिक बिजली लोड करना बड़ा मुद्दा है, क्योंकि कम शक्ति पर मोटर चलाने से मोटर दक्षता में महत्वपूर्ण गिरावट आ सकती है। उदाहरण के लिए, आंशिक शाफ्ट शक्ति के लिए मोटर दक्षता 70% से कम हो सकती है।
इलेक्ट्रिक मोटर्स - विशेष रूप से PMSMs - 2020 में NavCad के लिए हमारे विकास कार्य का एक महत्वपूर्ण फोकस हैं। हम "ईंधन" और सामान्य मोटर वक्र आकार (जैसे "निरंतर- टोक़, निरंतर-शक्ति") प्रारंभिक चरण के डिजाइन के लिए। और, ज़ाहिर है, हम ऑफ-डिज़ाइन आंशिक लोड दक्षता मानचित्रों के लिए भविष्यवाणी मॉडल में गहरे हैं!
इस कहानी को मरीन टेक्नोलॉजी रिपोर्टर के मार्च 2020 संस्करण में पढ़ें: https://magazines.marinelink.com/nwm/MarineTechnology/202003/#page/20
डोलड्रम्स क्षेत्र में समुद्र के नीचे हाइड्रोथर्मल वेंट की खोज की गई
-गहरे-172040 "आरओवी सुबास्टियन के पायलटों ने लगभग 3,890 मीटर (2.4 मील) गहरे एक हाइड्रोथर्मल वेंट चिमनी से भूवैज्ञानिक नमूना एकत्र किया। वैज्ञानिकों ने अटलांटिक महासागर के सबसे कम खोजे गए क्षेत्रों में से एक, डॉल्ड्रम्स मेगाट्रांसफॉर्म और फ्रैक्चर ज़ोन में दो नए हाइड्रोथर्मल वेंट क्षेत्रों की खोज की है। यह विशाल, विवर्तनिक रूप से सक्रिय प्रणाली मध्य-अटलांटिक रिज को काटती है, जो दुनिया की सबसे लंबी पर्वत श्रृंखला का निर्माण करती है। इस प्रकार के वेंट क्षेत्र अपनी संकर \"प्लंबिंग\" प्रणालियों के कारण दुर्लभ हैं, जिनमें विशिष्ट ज्वालामुखीय संरचनाएं होती हैं।")
आर्कटिक अनुसंधान पर जमी बर्फ को तोड़ना

गहन अध्ययन: ड्रेजिंग उद्योग में चुनौतियाँ और रुझान

प्रेरणा के बीज बोना: ईलग्रास का पुनर्स्थापन

-नील-सवार-डेटा-171390 "विश्व स्वास्थ्य संगठन (डब्ल्यूएचओआई) के आर/वी नील आर्मस्ट्रांग पर सवार शोधकर्ता वास्तविक पर्यावरणीय डेटा एकत्र करने के लिए उपयोग किए जाने वाले महासागर अवलोकन प्रणालियों को तैनात करते हैं, जो परिचालन संबंधी निर्णय लेने, मॉडलिंग और दीर्घकालिक महासागर निगरानी में सहायक होते हैं। © डब्ल्यूएचओआई")
")



")
-170484 "(क्रेडिट: वैन ओर्ड)")
