रोबोटिक्स: सबसाइड व्हीकल में नेक्स्ट जेन

Thyssenkrupp की MUM अवधारणा। Thyssenkrupp से छवि।

यूएसईए का uLARS सतह ड्रोन। यूएसईए से छवियाँ।
आविष्कार के एमयूएम (और बेटियां): समुद्र की अप्सराएं और एमयूएम नई पीढ़ी के पानी के नीचे के सिस्टम और वाहनों को प्रेरित कर रहे हैं। ऐलेन मसलिन एक नज़र रखता है।
पानी के नीचे डोमेन में प्रवेश करने के लिए आवेदकों की सूची तेजी से बढ़ रही है। पानी के नीचे स्वायत्त माताओं से अवधारणाएं बदलती हैं, लंबी दूरी पर ड्रॉप तैनात सागर तल नोड्स के झुंडों के लिए पेलोड की एक सरणी ले जाने में सक्षम हैं जो पूर्व-प्रोग्राम किए गए स्थानों पर अपना रास्ता खोज सकते हैं।
ऊर्जा पर: कनेक्टेड, जैसा कि ओस्लो-आधारित सबीसा वैली क्लस्टर और वार्षिक सम्मेलन को अब कहा जाता है, इनमें से कुछ अवधारणाओं को रेखांकित किया गया था, जिनमें दो नॉर्वेजियन प्रौद्योगिकी फर्मों और जर्मनी की थिसेनक्रुप शामिल हैं, जो नौसेना की उप-प्रणाली प्रणालियों को डिजाइन करने के लिए इस्तेमाल की जाने वाली एक फर्म है।
यूएसईए ने यूएलआरएस का खुलासा किया
एक, नॉर्वेजियन प्रौद्योगिकी स्टार्ट-अप यूएसईए, एक सबसिडी और सतह ड्रोन संयोजन के माध्यम से मौजूदा मानवयुक्त पोत समर्थित उप-संचालन को बाधित करने के लिए एक हाइब्रिड प्रणाली का प्रस्ताव दे रहा है।
यूएसईए की स्थापना 2017 में हुई थी और तब से यह अंडर वॉटर ड्रोन (यानी स्वायत्त पानी के नीचे के वाहनों या एयूवी) का समर्थन करने के लिए एक सतही ड्रोन, या मानव रहित सतह पोत (यूएसवी) का विकास कर रहा है, ताकि मानवयुक्त जहाजों की कोई आवश्यकता न हो और बैटरी रिचार्जिंग हो सके। पानी में किया गया, लॉन्च और रिकवरी ऑपरेशन से बचा गया। यह अन्य सतह ड्रोन अवधारणाओं के लिए अलग है, जो रिचार्जिंग के लिए AUV या रिमोट संचालित वाहन (ROV) की पूर्ण वसूली पर भरोसा करते हैं। यूएसईए के सीईओ फेलिप लीमा का कहना है कि यूएसईए के सिस्टम को अंडरलायर्स (एलएआरएस अर्थ लॉन्च एंड रिकवरी सिस्टम) कहा जाता है।
यह स्वाभाविक प्रगति है। लीमा कहते हैं कि आज के एयूवी अधिक सक्षम और विश्वसनीय हो रहे हैं। “वे अंतरिक्ष ले जा रहे हैं जो ROVs का पिछवाड़ा रहा है। लेकिन, उनके पास एक सीमा है; वे बैटरी पर भरोसा करते हैं, क्योंकि वे ROVs की तरह सक्षम नहीं हैं, और उन्हें अभी भी एक मदरशिप की आवश्यकता है, उदा। एक सर्वेक्षण पोत, क्योंकि उनकी बैटरी 12-48 घंटों में बाहर निकल जाती है। AUV के लिए एक मोबाइल डॉकिंग स्टेशन के साथ, आप सीबेड पर डॉकिंग स्टेशन पर निर्भर नहीं हैं और आपको एक बड़े जहाज पोत की आवश्यकता नहीं है। "
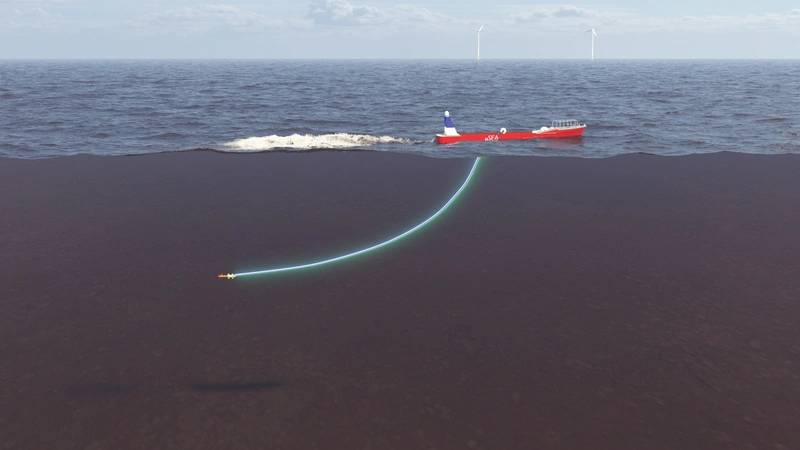 यूएसईए का uLARS अंडरवाटर डॉकिंग इंटरफ़ेस (चित्र: uSEA)
यूएसईए का uLARS अंडरवाटर डॉकिंग इंटरफ़ेस (चित्र: uSEA)
सिस्टम में एक सबमर्सिबल टोइंग हेड शामिल होता है, जिसमें चार्जिंग और डेटा ट्रांसफर के लिए एक इंडक्टिव कनेक्टर होता है, जो फाइटर जेट्स के इन-एयर रीफ्यूलिंग की तरह थोड़ा काम करता है। "इसका मतलब है कि लहरों से कम से कम प्रभाव पड़ता है क्योंकि डॉकिंग एक नियंत्रित गहराई पर है," लीमा कहती हैं, जिन्होंने यूनिवर्सिटी ऑफ एबरडीन से सब्सिया इंजीनियरिंग में एमएससी और ओस्लो विश्वविद्यालय से नवाचार और उद्यमिता में एमएससी किया है। सुरक्षित रूप से डेक पर AUV को पुनर्प्राप्त करने के लिए चंद्रमा पूल-आधारित हैंडलिंग प्रणाली के माध्यम से भी है।
यह प्रणाली उथले पानी के साथ-साथ गहरे और अति-गहरे पानी में उप-सर्वेक्षण का समर्थन करेगी, और अधिक पारंपरिक प्रकारों जैसे साइड-स्कैन सोनार और मल्टीबीम इकोसाउंडर्स से लेकर अधिक उन्नत एपर्चर सोनार जैसे कई उन्नत प्रकार के पेलोड का संचालन करेगी।
यूएसईए योग्यता कार्यक्रम को पूरा करने के लिए भागीदारों की तलाश कर रहा है, जो कि अगले साल (2020) के अंत तक होने की उम्मीद है। उसके बाद, कंपनी समुद्र में परिचालन को लक्षित कर रही है और यह 2021 में प्रदर्शन करने के लिए पायलट परियोजनाओं की तलाश कर रही है।
सागर में एक iDROP
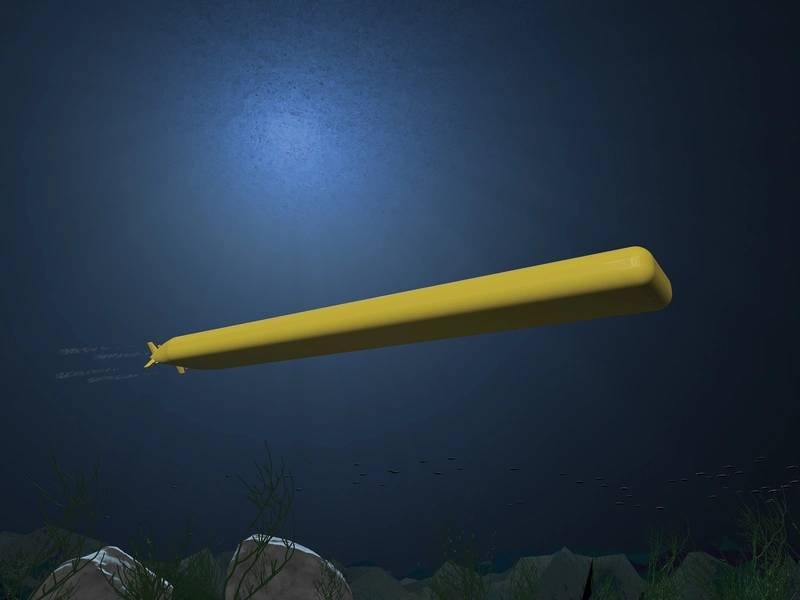
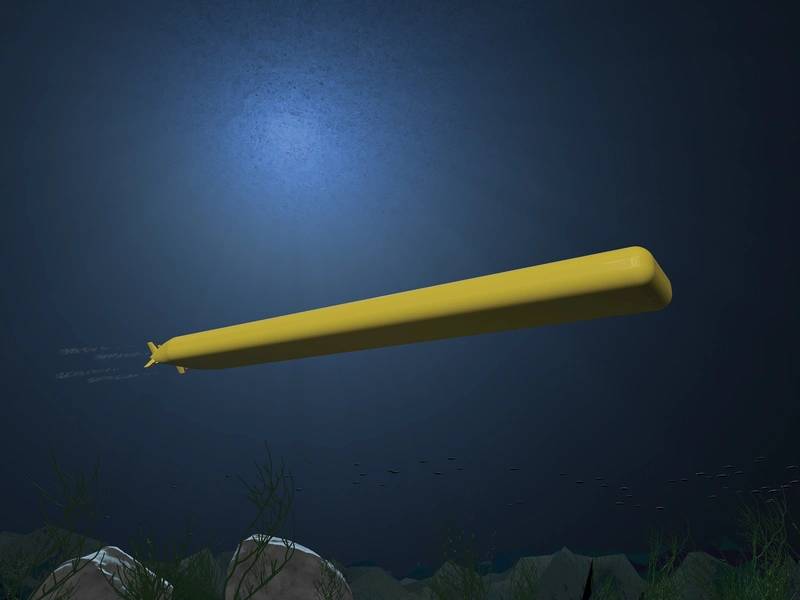
एक अन्य नॉर्वेजियन प्रौद्योगिकी फर्म, iDROP, अपने स्वायत्त Oceanid नोड्स के साथ सीबेड भूकंपीय प्रौद्योगिकी बाजार को बाधित करने की योजना बना रही है। iDROP की प्रणाली अलग-अलग बेलनाकार सेंसर नोड्स (ग्रीक समुद्री अप्सराओं के नाम पर) पर आधारित है, जिन्हें ड्रॉपफॉल तैनात किया गया है, जो प्रणोदन और स्थिति नियंत्रण के लिए गुरुत्वाकर्षण और गिट्टी शिफ्ट का उपयोग करते हुए, समुद्र तल पर विशिष्ट पूर्व नियोजित पदों पर उतरने के लिए जहां वे एल्यूमीनियम पैरों पर उतरते हैं जो बाहर निकलने से पहले वे भूमि।
 एक iDROP का ओशनिड। ग्रीक पौराणिक कथाओं में, ओसिड्स अप्सरा हैं जो टाइटन्स ओशियनस और टेथिस की 3000 बेटियां थीं। (छवि: iDROP)
एक iDROP का ओशनिड। ग्रीक पौराणिक कथाओं में, ओसिड्स अप्सरा हैं जो टाइटन्स ओशियनस और टेथिस की 3000 बेटियां थीं। (छवि: iDROP)
यह विचार है कि उन्हें भूकंपीय सर्वेक्षण के लिए सीबेड पर ग्रिड पैटर्न बनाने के लिए समूहों में तैनात किया जा सकता है। ऑनबोर्ड बैटरियां डीसेंट कंट्रोल (ऐसा करने वाले बैटरी के सिर्फ 5% का उपयोग करके), डेटा हार्वेस्टिंग (180 दिनों के लिए) और 30kg गिट्टी से मुक्त होने वाले एक तंत्र को ट्रिगर करती हैं - जो नमक के घोल से बना होता है - इकाइयों को सतह पर वापस विभाजित करने की अनुमति देता है। फिर से, नियंत्रण में इसलिए वे एक अपेक्षित लक्ष्य की ओर लक्ष्य करते हैं। एक अस्थायी कन्वेयर बेल्ट प्रकार की व्यवस्था के साथ एक सतह प्रणाली फिर उन्हें इकट्ठा करेगी। "मुख्य रूप से टो किए गए भूकंपीय अधिग्रहण प्रौद्योगिकियों की एक किस्म है," किर्र जे त्ज्म, आईड्रॉप के संस्थापक और सीईओ कहते हैं, जो पहले शालम्बर से काम कर चुके हैं और इसके लिए परामर्श कर चुके हैं। इक्विनोर और सीबेड जियो सॉल्यूशंस। “एक नोड है जो आरओवी द्वारा सीबेड पर रखा जाता है। कुछ अन्य हैं जहाँ आप उन्हें ठोस गिट्टी और कुछ प्रस्तावित विकल्पों के साथ किनारे पर फेंक देते हैं। हमारी प्रणाली भारी हैंडलिंग मशीनरी और समय लेने वाले ROV संचालन के साथ बड़े विशेषज्ञ जहाजों के लिए आवश्यकता को हटा देगी। "
ओसिड्स के समूहों को तेजी से और सेंसर प्वाइंट ग्रैन्युलैरिटी (यानी क्षेत्र कवरेज और इसलिए कितना डेटा पुनर्प्राप्त किया जा सकता है) में तैनात किया जा सकता है, वे कहते हैं। यह ऊर्ध्वाधर स्वायत्त पार्श्व विस्थापन क्षमता के 69 डिग्री के लिए धन्यवाद है, प्रत्येक नोड के साथ "पूर्व-निर्धारित स्थिति में" गिर रहा है। "यदि आप 1200 मीटर पानी की गहराई में एक सेंसर तैनात करना चाहते हैं, तो आप सतह के बर्तन से 2 किमी दूर तक पहुंच सकते हैं और एक लाइन के बजाय सेंसर के एक पैच को स्थापित कर सकते हैं," वे कहते हैं।
Tjøm कहते हैं, नौ नोड्स के बैच, एक आगमनात्मक मॉडेम, ट्रांसपोंडर और भूकंपीय सेंसर पेलोड के साथ प्रत्येक, 15 मिनट में स्थापित किया जा सकता है, स्थापित विधियों की तुलना में 10 गुना समय की बचत। एक डिजिटल ट्विन, जो विस्तारित मॉडलिंग और परीक्षण पर आधारित है, का उपयोग किसी भी पर्यावरणीय प्रभाव, जैसे कि पहचान करने में मदद के लिए किया जाएगा। तरंगों, वर्तमान, गहराई, आदि, और इसलिए वंश के नियंत्रण को सक्षम करते हैं।
Tjøm कहती है, '' हम समुद्र के तल पर जिस तरह से समुद्र के किनारे नोड्स लगाए जाते हैं, उसमें क्रांति करते हुए देख रहे हैं। “प्रति दिन 40-170 प्रतियोगी करते हैं और दो ROV, DP-नियंत्रित नोड हैंडलिंग सिस्टम, एक बड़े पोत और विशेष चालक दल की आवश्यकता होती है। जितनी गहराई में आप जाते हैं, ROV धीमे होते हैं, क्योंकि उन्हें नाभि खींचने के लिए अधिक जोर की आवश्यकता होती है। हम मानक समुद्री चालक दल के साथ प्रति दिन सिर्फ 1000 से कम करेंगे। ”
पर्दे के पीछे ओशनिड्स प्रोजेक्ट में बहुत सारे काम किए गए हैं और यह केवल अब है कि तकनीक को बढ़ावा दिया जा रहा है। वास्तव में, परियोजना 2010 में शुरू हुई, 2013/14 में निर्मित एक प्रोटोटाइप के साथ। iDROP ने एक रिकवरी सिस्टम भी बनाया है और रिकवरी सिस्टम को सत्यापित करने के लिए एक इंशोर परीक्षण किया है। उत्तरी सागर में इस वर्ष के लिए गहरे पानी में 3 डी भूकंपीय डेटा प्राप्त करने वाला एक दूसरा पायलट परीक्षण किया गया है। आने वाले वर्ष में निर्मित होने की योजना के साथ, नौ वाहनों का निर्माण किया गया था और पहले छमाही में परीक्षण के लिए अपतटीय थे।
चुप्पी साधना
जर्मन औद्योगिक समूह का एक हिस्सा थिसेनक्रुप मरीन सिस्टम्स (एमएस), यूएसईए और यूएएलएआरएस दोनों के लिए एक अलग पैमाने पर काम कर रहा है। फर्म एक बहुत बड़ी (50 मीटर तक) मानव रहित पानी के नीचे वाहन (यूयूवी) को डिजाइन कर रहा है, जिसे एक मॉड्यूलर डिजाइन के आधार पर एक मॉडिफाइड पानी के नीचे की मातृत्व (एमयूएम) कहा जाता है, जिसमें बुनियादी और मिशन मॉड्यूल शामिल हैं।
इसके पीछे सोच यह है कि आज के सबसाइड अंडरवाटर व्हीकल मार्केट में विशेष उत्पादों का बोलबाला है, जिसमें एक भी वाहन का उपयोग कई कार्यों के लिए नहीं किया जा सकता है। इसलिए, Thyssenkrupp एक मॉड्यूलर प्रणाली के डिजाइन के बारे में सेट करता है, Willem Hendrik Wehner कहते हैं, जो Thyssenkrupp MS में प्रोजेक्ट की देखरेख करता है।
 Thyssenkrupp की MUM अवधारणा (चित्र: Thyssenkrupp)
Thyssenkrupp की MUM अवधारणा (चित्र: Thyssenkrupp)
बुनियादी मॉड्यूल ट्रिम और डाइविंग सिस्टम, बैटरी, प्रोपल्शन और एक हाइड्रोजन ईंधन सेल होंगे। फिर, मिशन केंद्रित मॉड्यूल समुद्र तल से भूकंपीय नोड (ओबीएन) तैनाती (> 1000 ओबीएन) से लेकर कोर ड्रिलिंग सिस्टम तक हो सकता है, या उप-नियंत्रण मॉड्यूल से दूरस्थ रूप से संचालित वाहनों की मेजबानी के लिए बदल सकता है, जो एक बड़े जहाज के रूप में यूयूवी का उपयोग करेगा। एक एमयूएम मॉड्यूलर किट में ऐसे मॉड्यूल्स होंगे जो मानक 20 फीट या 10 फीट कंटेनर के आकार के होंगे। उन्हें मिशन के विनिर्देशों के अनुसार जोड़ा जा सकता है, जिसके परिणामस्वरूप काफी अलग-अलग वाहन हैं, 80 मीट्रिक टन से लेकर 300 मीट्रिक टन से ऊपर या 20 मी-लंबे, 4 मी-चौड़े और 3 मीटर ऊंचे से लेकर लगभग 50 मीटर लंबे, 7 मीटर चौड़े और 3 मीटर तक। उच्च, पेलोड और प्रणोदन की गति पर निर्भर बिजली की खपत के साथ।
"अन्य पानी के नीचे के वाहनों में मॉड्यूलर दृष्टिकोण होता है, लेकिन मुख्य रूप से पेलोड अनुभाग के एक अनुकूलन के संदर्भ में या अधिक ऊर्जा क्षमता को जोड़कर धीरज का विस्तार होता है," वेहनेर कहते हैं। "एक अच्छा उदाहरण एटलस का सीकैट एयूवी है, जो वाहन के प्रमुख को स्वैप करके अपने पेलोड को बदल सकता है और अधिक बैटरी क्षमता जोड़कर सीमा का विस्तार कर सकता है।"
वेहनर का कहना है कि एमयूएम वाहन अपने 80-160kW हाइड्रोजन ईंधन सेल शक्ति के साथ और हजारों मीटर पानी की गहराई के साथ, वाहन विन्यास के आधार पर सैकड़ों मील की यात्रा करने में सक्षम होगा। “पानी के भीतर की सीमा स्केलेबल है और 100 मील के समुद्री क्षेत्र में है; वर्तमान उपयोग के मामलों के लिए पूरी तरह से पर्याप्त है, ”वह कहते हैं। “ईंधन सेल के लिए हमारी गैस भंडारण प्रणाली बैटरी के प्रति ऊर्जा के संबंध में तीन गुना बेहतर है और वजन के संबंध में और भी अधिक। हालाँकि, यदि आप 1000 से अधिक समुद्री मील को कवर करना चाहते हैं, तो हम एक अधिक पारंपरिक उदाहरण डीजल-इलेक्ट्रिक दृष्टिकोण के साथ निकट-सतह पारगमन की सिफारिश करेंगे। अवधारणा इसके लिए अनुमति देती है। ”
हाइड्रोजन ईंधन कोशिकाएं थिसेनक्रुप पनडुब्बियों के लिए एक सिद्ध वायु-स्वतंत्र तकनीक हैं; कंपनी के पास जर्मन HDW क्लास 212A पनडुब्बी के साथ-साथ अन्य पनडुब्बियों में हाइड्रोजन ईंधन कोशिकाओं के साथ गहरा अनुभव है। Thyssenkrupp कहते हैं, बैटरियों को कुछ पेलोड के चरम भार के लिए आवश्यक हो सकता है, लेकिन वर्तमान में MUM वाहन के अधिकांश डिज़ाइनों में केवल एक छोटे आकार का बैकअप / आपातकालीन बैटरी है। सतह या निकट सतह पारगमन के लिए एक मॉड्यूल को इस समय डिजाइन किया जा रहा है, क्योंकि ईंधन सेल प्रणाली में पानी के नीचे के कार्यों के लिए अपनी ताकत है।
लंबी दूरी के संचार के लिए, लंबे मिशनों पर, थिससेनक्रुप एमएस स्व-चालित मोडेम, या स्वायत्त संचार नोड्स का उपयोग करने के लिए देख रहा है, द्वि-दिशात्मक डेटा ट्रांसमिशन क्षमता के साथ, इन नोड्स की एक श्रृंखला के माध्यम से लंबी दूरी की ध्वनिक संचार बनाने के लिए, साथ ही साथ। यूएसबी नेविगेशन के माध्यम से स्थानीय नेविगेशन या 3 डी पोजिशनिंग। इन्हें EvoLogics द्वारा NaviMUM नामक एक उप-परियोजना के तहत विकसित किया जा रहा है और इसे MUM पर एक रिवॉल्वर पत्रिका से तैनात किया जाएगा।
EvoLogics कॉन्सेप्ट को एक सेल्फ-ऑर्गनाइजिंग मोबाइल अंडरवाटर नेटवर्क कहता है, जिसमें नोड्स के साथ-साथ रिले स्टेशन होते हैं और साथ ही पोजिशनिंग प्रदान करते हैं। वे स्वायत्त रूप से एक मिशन क्षेत्र में बाहर निकलेंगे, संचार वातावरण का विश्लेषण करेंगे, फिर स्थिति पकड़ेंगे और एक लचीले पानी के नीचे नेटवर्क बनाने के लिए इंटरकनेक्ट करेंगे। Wehner कहते हैं, कुछ के पास समय-समय पर वास्तविक स्थिति फिक्स करने के लिए एक GNSS रिसीवर होगा।
Thyssenkrupp कहते हैं, "MUM जैसे बहुत बड़े वाहनों को विशेष रूप से स्वायत्त बाधा निवारण और ट्रैक पुन: नियोजन के लिए मजबूत सेंसर और एल्गोरिदम की आवश्यकता होती है।" “स्व-समायोजन नियंत्रण एल्गोरिदम जो संभव वाहन विन्यास की बड़ी विविधता को दर्शाते हैं, वाहन की अवधारणा का समर्थन करेंगे। परियोजना स्व-चालित एलबीएल / यूएसबीएल मोडेम के साथ एक मोबाइल संचार और नेविगेशन प्रणाली विकसित करती है जो पारगमन और चार्जिंग के लिए एमयूएम वाहन पर एक नेटवर्क और डॉक स्थापित कर सकती है। "
Thyssenkrupp MS Mm का एक छोटा-सा संस्करण बना रहा है, जो 5m-long पर है, जो इस गर्मी (2019) के परीक्षण के लिए तैयार होगा। इस प्रणाली पर कई अवधारणाओं, विशेष रूप से स्वायत्तता सॉफ्टवेयर और मोबाइल संचार का परीक्षण किया जाएगा। नई हाइड्रोजन ईंधन सेल जैसी मुख्य प्रौद्योगिकियों के साथ-साथ एक नए दबाव पतवार डिजाइन का परीक्षण भी वास्तविक आकार में, इस वर्ष किया जाएगा।
एक वास्तविक स्तर का एमयूएम वाहन 2020 से परीक्षण करने के लिए बनाया गया है, जिसमें परीक्षण और परीक्षण 2023-24 तक के हैं। विकास को तेल और गैस उद्योग से एक सलाहकार पैनल द्वारा समर्थित किया जा रहा है, जिसमें ऑपरेटर इक्विनोर, भूकंपीय कंपनी पीजीएस और उप-ठेकेदार बोस्कलिस शामिल हैं।
कंपनी के पास ATLAS ELEKTRONIK, तकनीकी विश्वविद्यालय बर्लिन और यूनिवर्सिटी ऑफ़ रोस्टॉक क्रमशः प्रोजेक्ट, नियंत्रण प्रणाली और सिस्टम सिमुलेशन पर काम कर रहा है।
आर्कटिक अनुसंधान पर जमी बर्फ को तोड़ना

गहन अध्ययन: ड्रेजिंग उद्योग में चुनौतियाँ और रुझान

प्रेरणा के बीज बोना: ईलग्रास का पुनर्स्थापन

अनिश्चितता से लाभ की ओर: WHOI ने उद्योग भागीदारों के लिए नई पहल शुरू की
-नील-सवार-डेटा-171390 "विश्व स्वास्थ्य संगठन (डब्ल्यूएचओआई) के आर/वी नील आर्मस्ट्रांग पर सवार शोधकर्ता वास्तविक पर्यावरणीय डेटा एकत्र करने के लिए उपयोग किए जाने वाले महासागर अवलोकन प्रणालियों को तैनात करते हैं, जो परिचालन संबंधी निर्णय लेने, मॉडलिंग और दीर्घकालिक महासागर निगरानी में सहायक होते हैं। © डब्ल्यूएचओआई")
ओ-रिंग सील डिजाइन, भाग 2: बाह्य दबाव के लिए रेडियल सील
")
मानवरहित बेड़े का विस्तार: एकल पोतों से लेकर प्रणाली-स्तरीय संचालन तक

श्मिट ओशन इंस्टीट्यूट की शोध टीम ने 31 नई प्रजातियों की खोज की।

AUKUS अल्ट्रा-यूवी विकसित करेगा, डिलीवरी 2027 में निर्धारित है।

वार्ड को गहरे समुद्र में अनुसंधान पोत के लिए रिकॉर्ड 800 मिलियन डॉलर का ऑर्डर मिला
")
Ørsted और PGE ने पोलैंड के बाल्टिका 2 अपतटीय पवन ऊर्जा संयंत्र में पहली नींव स्थापित की
-170484 "(क्रेडिट: वैन ओर्ड)")
MTR100: सबसी लीडर्स की प्रोफाइलिंग - आवेदन खुले हैं

उत्तरी अटलांटिक राइट व्हेल ने इस प्रजनन मौसम में 2009 के बाद से सबसे अधिक बच्चे पैदा किए हैं।
 को 9 अप्रैल, 2026 को केप कॉड खाड़ी में अपने बच्चे के साथ देखा गया। क्रेडिट: न्यू इंग्लैंड एक्वेरियम, NOAA परमिट #25739-01 के तहत लिया गया।")